Last updated on 8. 11. 2020
Od začátku (si) slibuji, že musím pořídit pulsní ovladač. Jezdím v analogu a přece jen klasické trafíčko (mám cosi prastarého od Trixu) je pro některé záležitosti dost limitující. Přes počáteční úvahy o zakoupení ovladače hotového jsem nakonec zabral špónu, navrhl a sestavil svoji vlastní konstrukci.
Požadavky byly jasné – nemusí to být nic super, zpětnou vazbu nepožaduji, samočinný rozjezd taky ne, ale co se mi na všech konstrukcích nezdálo, byl klasický knoflík – „točítko“. Na rozdíl od FZ1 a podobných, kde je uprostřed nula a směr kroucení odpovídá směru jízdy, má většina pulsních ovladačů nulu vlevo a směr se přepíná přepínačem. Čestná výjimka od Conrada (na kterou jsem měl zálusk) se už dva roky neprodává.
Abych se vyhnul logice kontroléru – volantu, napadlo mne použít směrově neutrální pákové ovládání, jako v letadle. Dopředu „plnej knedlík“, nula dole. Přepínání směru buď přepínačem, nebo, jak jsem nakonec realizoval, tlačítky. Přepínač jízda/posun, který zmenší regulační rozsah. Indikace zapnutí, jízdy a přetížení. Vše, jdeme na to.
Příslušná páčka se sežene tak, že na Aukru za padesát korun koupíte nefunkční vysílačku k RC vrtulníčku, mechaniku vezmete a zbytek vyhodíte. Nebojte, nic cenného tam není – Číňan to má vymyšlené tak, že po desce plošných spojů jezdí plechový běžec páčky, žádné speciální lineární potenciometry tam nenajdete. Ty si musíte koupit – v mém případě jsem využil miniaturní tahové potenciometry pro audiotechniku.
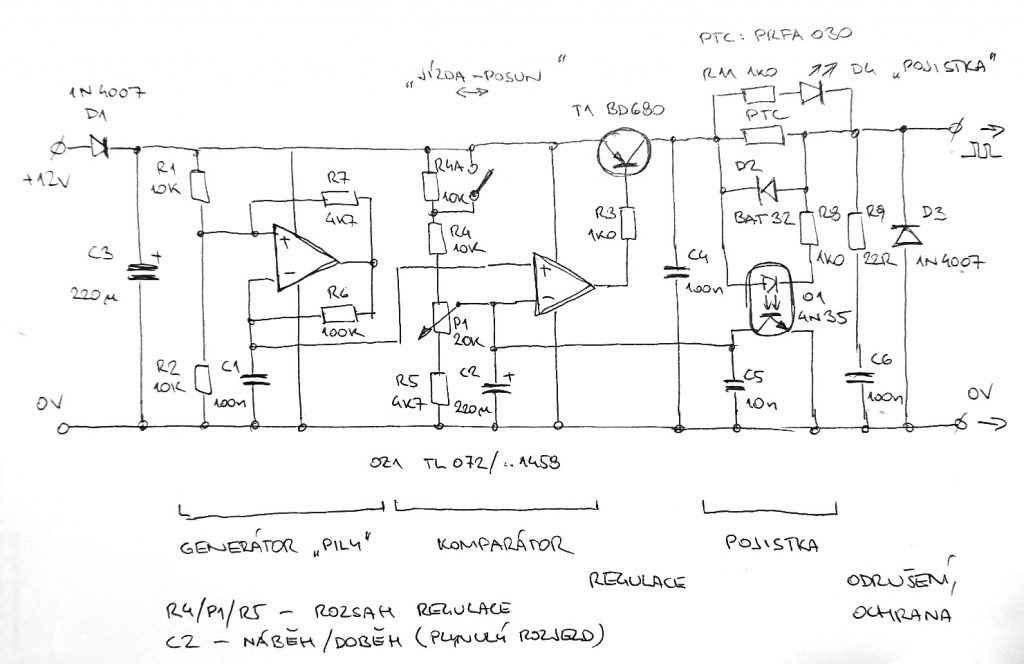
Otázka volby regulátoru byla jasná a tímto děkuji panu Báňovi (MTB BUS) za inspiraci – využil jsem jeho PWM regulátor jízdy a z dalšího zapojení elektronickou pojistku. Ovšem stejně tak vyhoví i jiná zapojení, např. s časovačem 555 apod.
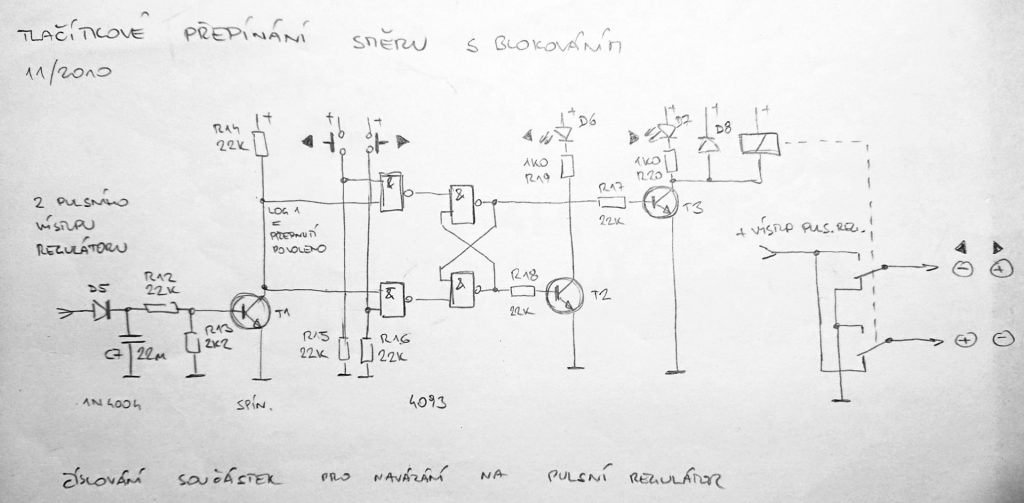
Přepínání směru obstarává relé, řízené klasickým klopným obvodem z hradel NAND, doplněným o blokování, pokud jsou na výstupu přítomné pulsy. Změnit směr tak lze jen při stojícím vlaku.
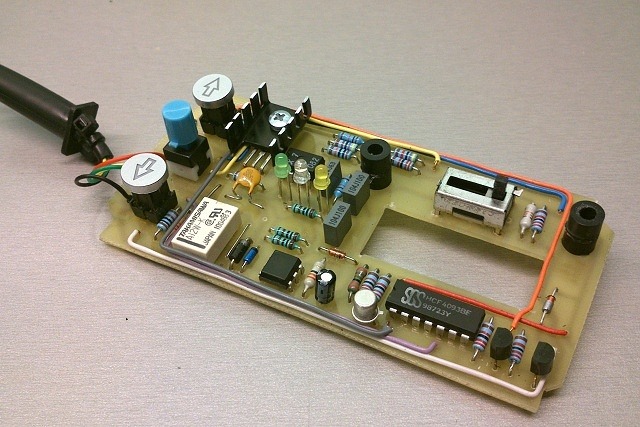
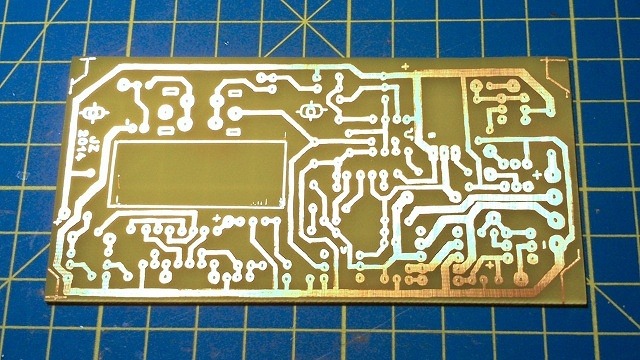
Zapojení jsem předem ověřil na nepájivém kontaktním poli, abych nenarazil na neočekávané potíže (no, ne že by to bylo pak zcela bez potíží, ale budiž…) Plošný spoj jsem po asi dvacetileté pauze v „bastlení“ nakreslil ručně fixkou a vyleptal roztokem chloridu železitého (vše z GM electronic) a překvapilo mne, jak dobře to šlo.
Po vychytání chyb a sesazení mechaniky s elektronikou (aneb dvakrát měř, jednou řež) se nakonec vše povedlo a jízdní zkoušky dopadly na výbornou. Ovládání je přehledné, vůle v páčce přijatelná a i se „splašenými“ lokomotivami se dá plynule rozjet a pak zabrzdit jak do peřin.
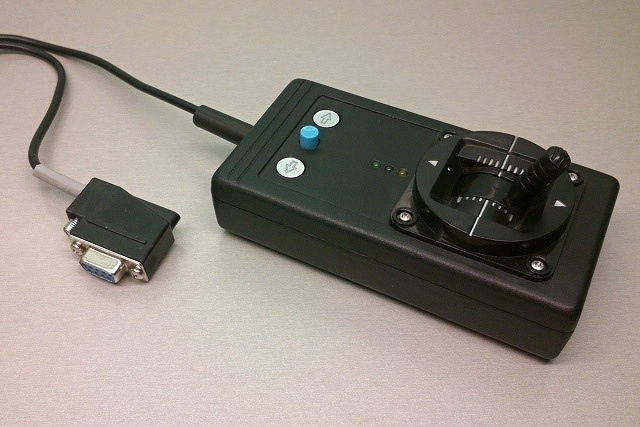
Připojení do panelu je provedeno konektorem Canon 9 pinů, dva vodiče vedou 12 V do ovladače a druhé dva už regulované napětí pro trakci zpět do kolejiště. Robustní provedení konektoru je zárukou spolehlivosti. Napájení kolejiště zajišťuje externí zdroj 12 V/3 A, podobný těm k notebookům, a ovladač je jen připojen do zásuvky na panelu, podobně jako u digitálního systému.

Protože mi z vysílačky zbyla ještě jedna páčka, tentokrát se středovou aretací, už plánuji další „level“ v podobě řízení jízdních stupňů a brzdy. Ovšem to už bude chtít mikroprocesor. Nebo přejdu na digitál 😉
Pozn.aut., 2017: b) se ukázalo správně 🙂
(c) 2014 Jiří Zlámal
Dobrý den.Moc pěkný pulzní regulátor.Nemáte k tomu plošňáku schéma?.Děkuji za odpověd a přeji pěkný den.M.Karlík 1mkarlik@seznam.cz 604358921.
Provedeno, viz výše. JZ