Last updated on 23. 8. 2022
Pro potřeby svého minikolejiště Malá Paka jsem potřeboval vyrobit přesuvnu. Abych mohl na jednom konci tratě měnit vozy a tvořit nové vlaky. Věc samotná není složitá, stačí jen přesně pracovat. Ale chtěl jsem od toho víc – když bude celé kolejiště řízené digitálně, nebudu přece tahat nějaký šuplík ručně.
Ideu přinesl známý modelář-elektronik-programátor Fulda svým řešením ovládání segmentové točny s jednočipovým procesorem a skrz tlačítka, kterou vytvořil pro Honzíkovy vláčky. To byl první nápad – a nakonec, tohle by mi stačilo, tři polohy, tři tlačítka a místo tlačítek se dají zapojit výstupy dekodéru příslušenství a je to. Jenže když jsem Fuldovi napsal, tak mne navedl na to, že on to nově chce řešit s Arduinem a ať se na to podívám taky a dal mi nějaké tipy. První dojem byl – no to nemám šanci dát dohromady. Ne elektricky, ale programově. Jednočipáky neumím a programoval jsem naposledy v Pascalu v době, kdy se na náměstí zvonilo klíčema.
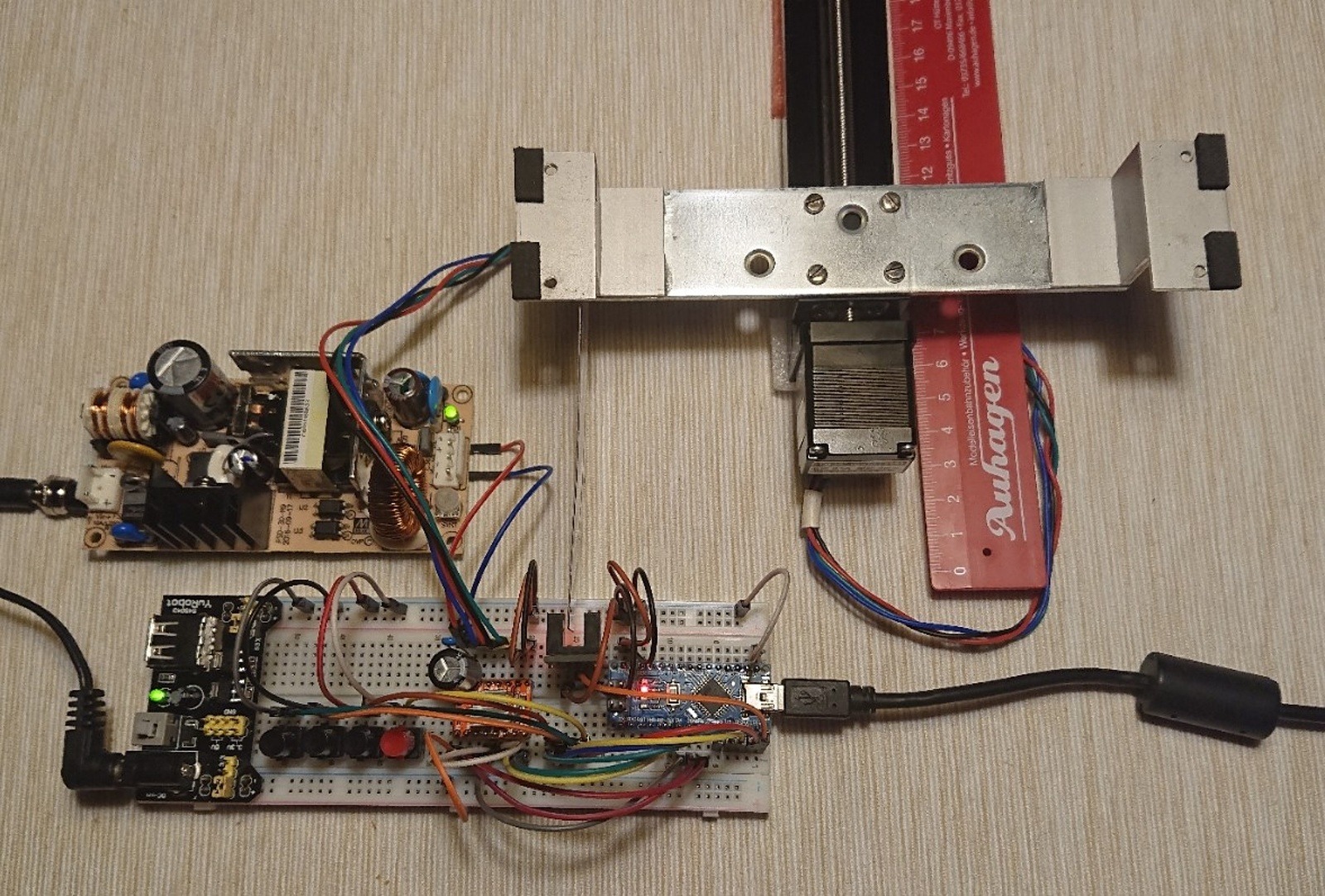
No ale nešlo jinak. Takže sehnat Arduino, driver pro krokové motory a hlavně ten motor. Ten jsem si vyhlídnul ještě dřív. Přesuvna bude malinká, tak proč shánět pojezdy na šuplíky a motor a závitovou tyč, když se to dá v Číně sehnat komplet a tisíckrát přesnější? Dá se koupit i tohle:

Kompletní lineární posuv pro 3D tiskárny s přesným kuličkovým vedením a krokovým motorem, to vše sesazeno a funkční za 40 dolarů. Most přesuvny s kolejemi se na něj uchytí přes nějaký plech, více informací k tomu najdete v článku o kolejišti.
Druhým krokem bylo Arduino – ono je to nakonec snadné. Zapojíte to do USB a nahrajete první program z příkladů, které jsou obsaženy v „přiloženém“ softwaru. A jakmile rozblikáte LED na desce Arduina, už je to jasné, jste lapeni a nedá vám to a ležíte v tom tak dlouho, dokud se to nenaučíte. Protože se na webu dají najít hotové příklady, jak přesuvnu či točnu řešit. Jenže – jeden řídí točnu skrz DCC, ale ne tlačítky a navíc je polohování točny jiné – má dva konce a otáčí se dokola. Druhý program je sice pro přesuvnu a pro ovládání tlačítky, ale zas nepoužívá plynulý rozjezd a dojezd. Člověk by přitom chtěl jak ovládání skrz DCC, tak i tlačítky a i ty plynulé rozjezdy a dojezdy. Takže zjistit, jak na to, vyzkoušet to na příkladech, krok po kroku a na cizích řešeních poznávat, jak to vlastně pracuje. A protože přesuvna funguje v reálném čase, musíte se naučit i to, jak vykonáváním jedné funkce neblokovat funkci jinou. A nejlepší je nakonec zjistit, že jste zvládli vyřešit a naprogramovat něco, co se i na fórech uvádí jako nevyřešená otázka – nouzové zastavení.
Po asi měsíci bádání a zkoušení je výsledek na světě. Arduino Nano je doplněno driverem krokových motorů A4988 a optosnímačem pro zjištění koncové polohy. Program využívá knihovnu Accelstepper pro plynulé řízení motoru a knihovnu NMRA DCC pro čtení povelů digitální centrály. Na vstupu je oddělovací optočlen, který ze signálu v kolejích převádí povely do Arduina. Když na ovladači stisknu příslušný povel pro přesun do jedné ze tří poloh, tak Arduino si vyslanou adresu převede na číslo polohy a motor se vydá tím směrem. Současně se stále čte stav tlačítek, pro každou pozici je určeno jedno, a přesuvnu je možno posouvat i tímto „místním“ ovládáním. Další z tlačítek slouží pro najetí přesuvny na optosenzor při začátku provozu – přesuvna si najde konec, vynuluje počitadlo polohy a je připravena k práci.
Chtěl jsem, aby bylo možné přesuvnu okamžitě zastavit, když se například dostane něco do její dráhy, nebo když si ji člověk spustí omylem v nevhodnou chvíli. Tlačítko je jedna možnost, ale člověk má v ruce DCC ovladač, který Stop funkci taky zná – její aktivací odpojíte z kolejiště napájení. Převod tohoto stavu do Arduina je snadný – další optočlen a když není v kolejích signál, vydej povel. Jenže co s tím dál – Accelstepper nezná něco jako okamžitý stop a různí autoři to řeší různě, ale ne uspokojivě. Chtěl jsem, aby po obnovení napájení bylo možné přesuvnu poslat do původně zamýšlené (nebo jiné) pozice bez nutnosti kalibrace polohy. Po dalším týdnu ležení v programu a zkoušení, co funguje a co ne, se to povedlo.
Dosti povídání, přejděme k faktům:
Co to umí:
– přesunout most přesuvny do požadované pozice na pokyn DCC ovladače (zadáním adresy) nebo po stisknutí tlačítka místního ovládání
– pomalé rozjezdy a dojezdy
– zkalibrovat výchozí polohu najetím na koncový optosenzor, opět skrz DCC nebo tlačítko
– okamžitě zastavit při povelu stop z ovladače (při odpojení DCC signálu z kolejiště) nebo při stisku nouzového tlačítka
Co to neumí:
– nastavovat jakékoliv parametry skrz DCC centrálu; základní adresa (prozatím 200) je zadaná v konfiguraci programu a další pozice jsou adresy po ní následující do počtu poloh přesuvny
– řídit mikrokrokování nastavením programu (dle mých zkušeností je nejlíp to vyzkoušet a pak zapojit natvrdo). Doplnit by to šlo, ale nemá to cenu.
Potřebný další software:
– knihovna NMRA DCC pro spolupráci s DCC protokolem. Obsažená v Arduino IDE, více zde: https://mrrwa.org/
– knihovna Accelstepper pro plynulé rozjezdy a zastavení a pro přímé zadávání cíle. Obsažená v Arduino IDE, dokumentace zde: https://www.airspayce.com/mikem/arduino/AccelStepper/
Potřebný hardware:
– Arduino Nano, stačí čínská verze (nutno stáhnout USB drivery)
– driver krokových motorů A4988 (trimrem je potřeba nastavit proudové omezení podle proudu motoru)
– koncový spínač (optosenzor, např. https://www.aliexpress.com/item/1908175930.html)
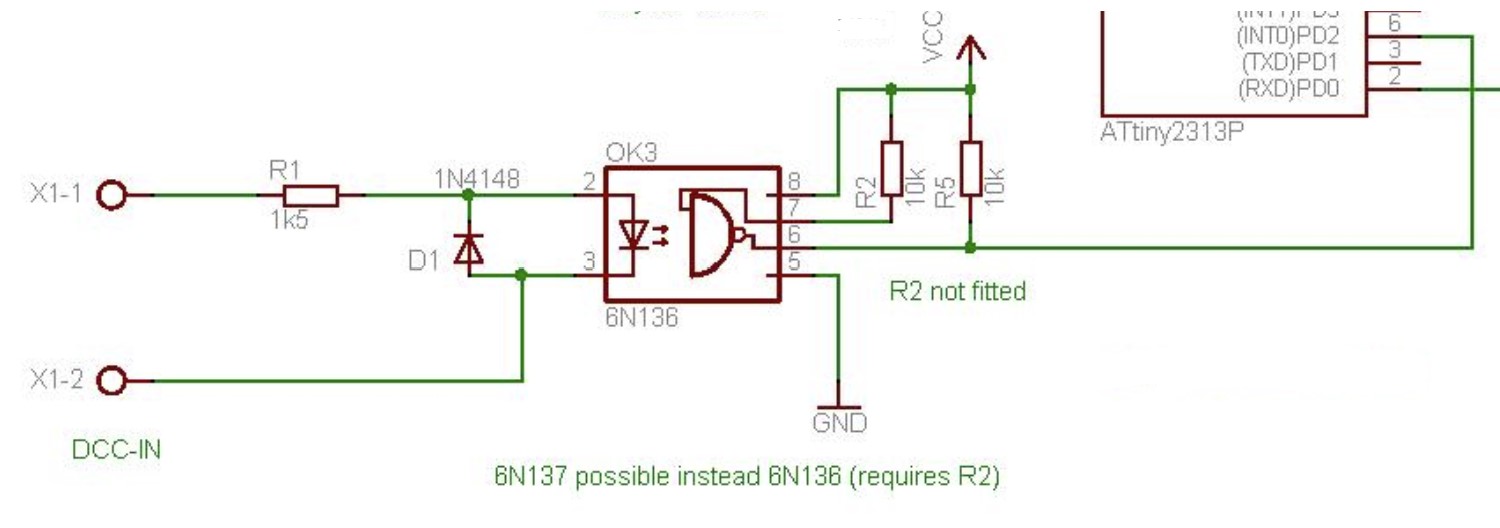
– optočlen pro vstup DCC signálu z kolejiště – schéma níže, je dobré využít tento obvod, protože tvaruje signál, Fulda doporučuje i low-pass filtr pro odstranění rušení
– druhý optočlen pro získání informace o napětí v koleji (schéma doplním, ale v principu to samé, je-li napětí v kolejích, tak tranzistor optočlenu zkratuje určený vstup Arduina proti zemi)
– tlačítka
– krokový motor, dvojfázový (4 dráty)
Co je kam zapojeno, je popsáno na začátku programu a okomentováno (zatím anglicky, můžu vám to přepsat, pokud bude zájem). Taky dále na obrázku.
Popis kódu:
Na začátku je definice vstupů a výstupů, následuje definice proměnných a parametrů.
DCC část – funguje s využitím přerušení na pinu 2, jakmile dorazí paket, převede se na číslo pozice. Je-li výsledek 0 (nula), zavolá se rutina pro najetí na optoseznzor (moveToHome), je-li výsledek jiné číslo z rozsahu pozic přesuvny, volá se rutina pro najetí na pozici (moveToPosition).
Tlačítková část – obsažena v hlavní smyčce, volají se tlačítka a získané číslo se opět převede na číslo pozice. Je-li žádaná pozice nula, skáče se hned na rutinu pro najetí na optosenzor, jinak se jede na zadanou pozici.
Tlačítka se načítají pomocí opakovaného čtení stavu vstupu pro potlačení zákmitů (pollButtons).
No a to je vše. Nejsem programátor, tohle je můj první program po 30 letech, tak tam určitě najdete spoustu chyb, ale funguje to.
Poděkovat musím zejména Fuldovi za nakopnutí, že jsem se do toho vůbec pustil a za nasměrování kde hledat. Pak už to bylo jen o zavaření vlastní hlavy.
Využil jsem i funkce pro volání tlačítek od Michaela Hardwicka a pak příklady z knihoven.
Naopak, funkci nouzového stopu při užití knihovny Accelstepper pokud vím nikdo nikde nepopisuje, tak jsem možná první.
Kód pro Arduino:
// Model railroad traverser control code for Arduino
// Version 1.1
//
// Features:
// - Manual control buttons
// - Acceleration and deceleration using the Accelstepper library
// - Emergency stop function
// - DCC interface using NMRA library
//
// (c) Jiri Zlamal, e-mail: jiri@zlamal.cz
// January 2021
// Creative Commons License BY-NC
// For commercial use, contact the author.
#include <AccelStepper.h> // Including the Accellstepper library
#include <NmraDcc.h> // Including the NMRA library
// Input/output pins used:
const int DIR_PIN = 4; // Direction pin for A4988 driver
const int STEP_PIN = 5; // Step control pin for A4988 driver
const int MS1_PIN = 8; // Microstepping control pin for A4988 driver (for future use)
const int MS2_PIN = 7; // Microstepping control pin for A4988 driver (for future use)
const int MS3_PIN = 6; // Microstepping control pin for A4988 driver (for future use)
const int ENABLE_PIN = 9; // Enable pin for A4988 driver
const int SENSOR_PIN = 10; // Limit switch - HOME position, active in HIGH state
const int BUTTON_PIN[4] = {A0, A1, A2, A3}; // Buttons: POS0 (Home), POS1, POS2, POS3
const int STOP_PIN = A4; // Emergency switch - stops the motor if connected to GND (low)
// Values:
const int TOTAL_POS = 3; // Total amount of working positions used;
const int POS[4] = {-25000, 1000, 11133, 21266}; // Traverser positions in steps (microsteps), to be calculated manually
const int MAX_SPEED = 2400; // Set the standard full speed of the traverser
const int SPEED = 1200; // Set the speed for slow approach to the sensor
const int ACCELERATION = 800; // Set the acceleration in steps/second^2
int MS_MODE = 8; // Default microstepping mode, for future development
int STOP_ACTIVE = HIGH; // Emergency stop input
const int BASE_DCC_ADDR = 200; // Base DCC address = position 0 address
int posNumber = 0; // Initial position;
#define motorInterfaceType 1 // Definition of how is the motor controlled, must be "1" if a driver is used
// Set up the AccelStepper object for the A4988 Stepper Motor Driver
AccelStepper stepper = AccelStepper(motorInterfaceType, STEP_PIN, DIR_PIN);
NmraDcc Dcc ; // Library initialisation
void setup() { // Set up the parameters:
stepper.setMaxSpeed(MAX_SPEED); // Stepper motor driver max speed (normal traverser speed)
stepper.setAcceleration(ACCELERATION); // Stepper moror driver acceleration
Serial.begin(9600); // Enable serial communication for debugging
Serial.println("Begin setup...");
pinMode(SENSOR_PIN, INPUT); // Set up the digital input and output pins...
pinMode(ENABLE_PIN, OUTPUT);
pinMode(STEP_PIN, OUTPUT);
pinMode(DIR_PIN, OUTPUT);
pinMode(MS1_PIN, OUTPUT);
pinMode(MS1_PIN, OUTPUT);
pinMode(MS1_PIN, OUTPUT);
pinMode(STOP_PIN, INPUT_PULLUP);
for (int i=0; i<(TOTAL_POS +1); i++) { // Set up the analogue push button pins using pullup resistors
pinMode(BUTTON_PIN[i], INPUT_PULLUP);
} // End of the pushbutton loop
Serial.println("NMRA DCC initializing...");
Dcc.pin(0, 2, 1); // Set up which External Interrupt, the Pin it's associated with that we're using and enable the Pull-Up
Dcc.init( MAN_ID_DIY, 10, CV29_ACCESSORY_DECODER | CV29_OUTPUT_ADDRESS_MODE, 0 ); // Call the main DCC Init function to enable the DCC Receiver
Serial.println("Init Done");
//moveToHome(); // Move the traverser to the home position after rebooting/powering up.
// Uncomment this function if it is required to move the traverser home after rebooting
} // End of the Setup void
// This function is called whenever a normal DCC Turnout Packet is received
void notifyDccAccTurnoutOutput( uint16_t Addr, uint8_t Direction, uint8_t OutputPower )
{
Serial.print("notifyDccAccTurnoutOutput: ") ; // Print the received packet values...
Serial.print(Addr,DEC) ;
Serial.print(',');
Serial.print(Direction,DEC) ;
Serial.print(',');
Serial.println(OutputPower, HEX) ;
posNumber = Addr - BASE_DCC_ADDR; // Get the position number from the received address
if (posNumber == 0) { // Check if the required position is 0 (Home)...
moveToHome(); // Call the moveToHome function to move to the HOME position.
}
else if
((posNumber > 0)&&(posNumber < (TOTAL_POS +1))) { // Check if the posNumber is within the allowed range to control the traverser
moveToPosition (posNumber); // Call the moveToPosition function to move to the selected track.
}
} // End of void ==================================================
int pollButtons() { // Function by Michael Hardwick
// To debounce the button input signals by repeated reading of their status
for (int i=0; i<4; i++) { // Cycle through the buttons
if (!digitalRead(BUTTON_PIN[i])) { // Look closer if the button appears pushed
int counter = 0; // If yes, set a counter to zero
while (!digitalRead(BUTTON_PIN[i])) { // Check the button every 10 ms for 100 ms
if (counter == 10){ // If the button was checked 10 times, it is pressed
return i; // So return the button index
}
counter++; // Increment the counter how many times was the button checked
delay(10); // Delay 10 milliseconds
}
}
} // End of button loop
return -1; // No button was pressed, so return -1. Necessary for correct operation!
} // End of void ==================================================
void moveToHome() { // This routine moves the traverser to the home position in two phases:
digitalWrite (ENABLE_PIN, LOW); // Enable the stepper motor
if(!digitalRead(SENSOR_PIN)) { // If the limit sensor is not active (i.e. the traverser is not at home)...
stepper.moveTo (POS[0]); // Move to a distant position behind the sensor
while(!digitalRead(SENSOR_PIN)) { // While the limit switch (sensor) is not reached...
if (digitalRead(STOP_PIN)) { // Check for the Emergency Stop signal (button or command) after each step
Serial.println("EMERGENCY STOP"); // Print a message if the STOP function is activated
stepper.stop (); // Stop the motor...
stepper.setCurrentPosition(stepper.currentPosition ()); // immediately by setting the current position as a target position
digitalWrite (ENABLE_PIN, HIGH); // Disable the stepper motor driver
return; // Exit the loop if the stop function is activated
}
stepper.run(); // Run the motor until the sensor is reached...
}
stepper.stop (); // Then stop the traverser...
stepper.setCurrentPosition(0); // and reset the stepper motor position counter to zero
}
stepper.moveTo (400); // Move a bit back... (This is done anyway, even if the traverser is at home, to ensure the position is correct
stepper.runToPosition(); // Run there
stepper.moveTo (-800); // And go again towards the sensor
while(!digitalRead(SENSOR_PIN)) {stepper.run();} // Run the motor until the sensor is reached again
stepper.stop (); // Then stop the traverser...
stepper.setCurrentPosition(0); // and reset the stepper motor position counter to zero
digitalWrite (ENABLE_PIN, HIGH); // Disable the stepper motor driver
Serial.println("Traverser is at HOME position."); // Print a message
} // End of void ==================================================
void moveToPosition(int posNumber) { // This routine moves the traverser into the selected position
Serial.print("Traverser moves to POS "); // Print out where is the traverser going
Serial.println(posNumber); // The position is defined by the button pressed
digitalWrite (ENABLE_PIN, LOW); // Enable the motor driver
stepper.moveTo (POS[posNumber]); // Run to the selected position
while (stepper.distanceToGo () != 0 ) { // While the final position is not reached...
if (digitalRead(STOP_PIN)) { // check for the Emergency Stop signal (button or command) after each step
Serial.println("EMERGENCY STOP"); // Print a message if the STOP function is activated
stepper.stop (); // Stop the motor...
stepper.setCurrentPosition(stepper.currentPosition ()); // immediately by setting the current position as a target position
}
stepper.run (); // If the Emergency stop is not active, run normally to the desired position
}
digitalWrite (ENABLE_PIN, HIGH); // Disable the stepper motor driver
Serial.print("Position "); // Print a message that the position was reached
Serial.print (posNumber);
Serial.println (" reached");
} // End of void ==================================================
void loop() { // Main loop
Dcc.process(); // Call the DCC process
// Poll for button presses. If a button is pressed, go home if the home button is pressed
// or go to selected position
int posNumber = pollButtons(); // Returns the button number (0-3)
if (posNumber == 0) { // HOME button was pressed
Serial.println("Home position selected"); // Print a message
moveToHome(); // Call the moveToHome function to move to the HOME position.
}
else if (posNumber > 0) { // Track position button was pressed
Serial.print("Position "); // Print a message which position was selected
Serial.print(posNumber);
Serial.println(" selected");
moveToPosition(posNumber); // Call the moveToPosition function to move to the selected track
} // End of void ==================================================
} // End of codeSchéma zapojení DCC vstupu:
Pozor, schéma je ilustrační, je odněkud staženo, na Arduinu využijte vstup D2, kde je vyvedeno přerušení INT0
Zapojení na zkušební destičce:
Určeno pro začátečníky a pro pokusy, bez DCC, jen na tlačítka:
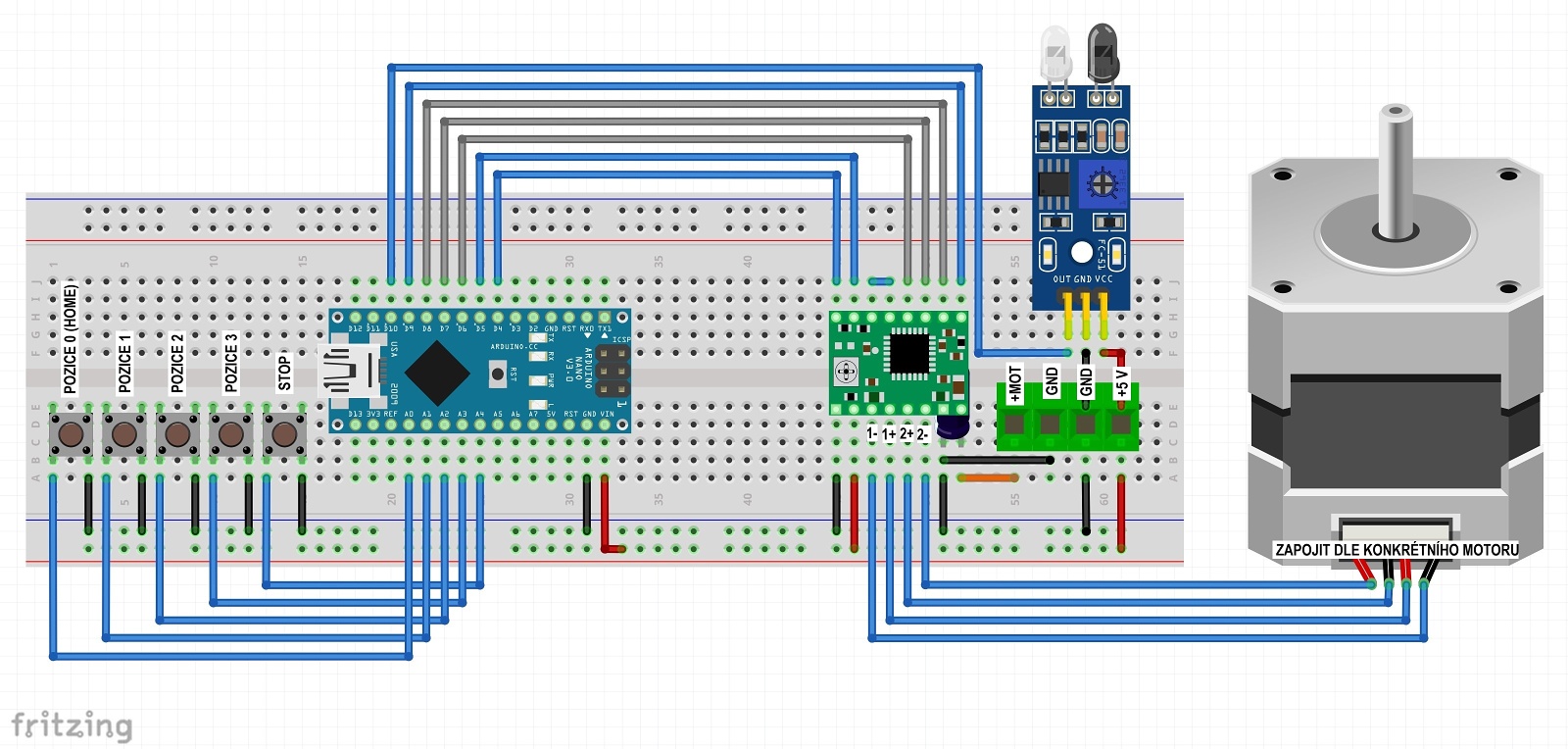
Pozn: šedé vodiče mezi Arduinem a driverem A4988 není třeba zapojovat, pokud nepoužijete mikrokrokování (viz výše, program to nevyžaduje, nastavíte to napevno).
Motor zapojte podle toho, jaký máte (viz popis výstupů u destičky driveru).
Driver A4988 vyžaduje kondenzátor cca 100 uF u vstupu napájení pro motor.
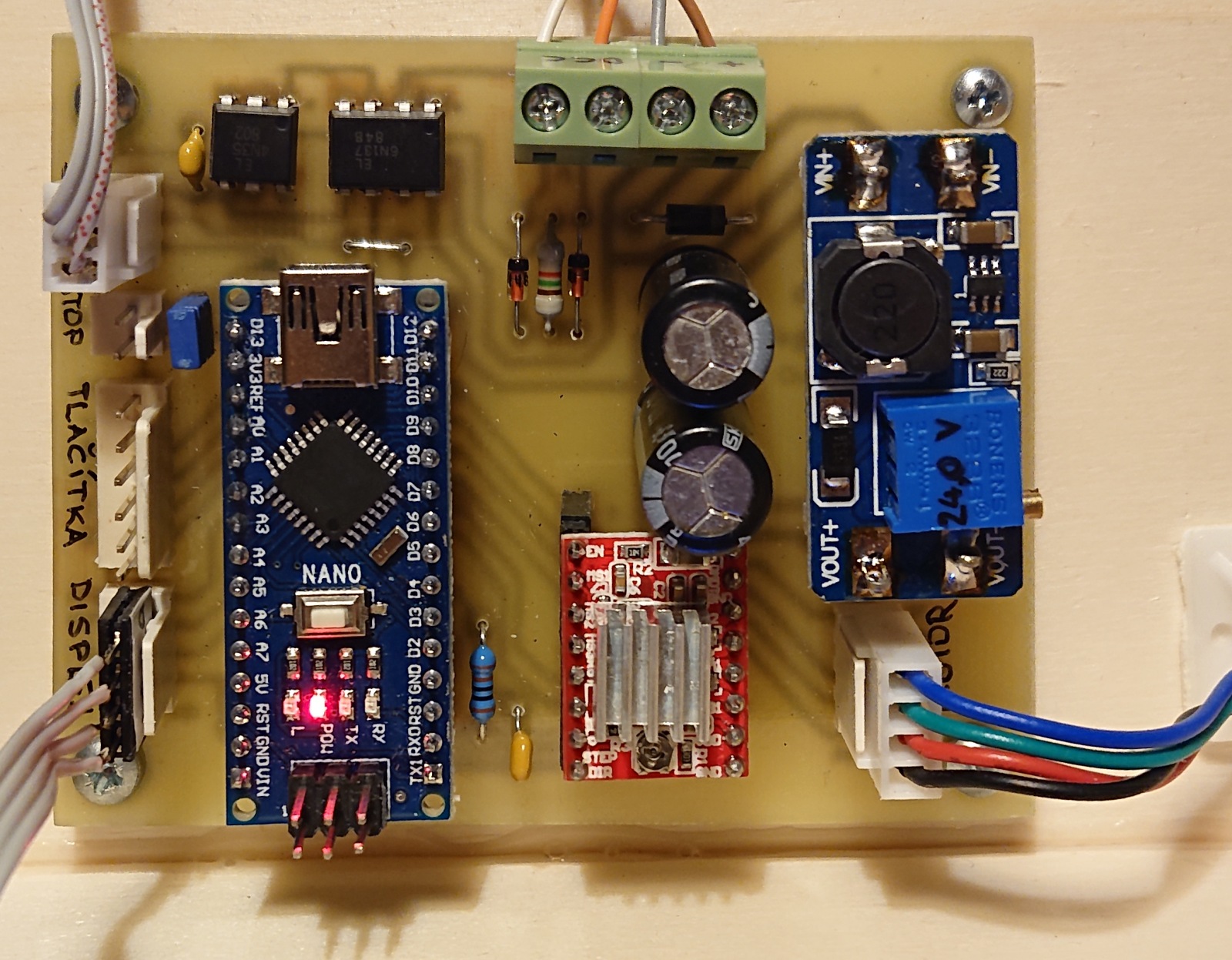
Fyzické provedení:
Celý vehikl je sestaven na desce plošných spojů a jednotlivé moduly jsou upevněny a připojeny přes násuvné konektory. Na kraji desky jsou vstupy a výstupy, stejně jako napájení. Deska obsahuje i DC/DC měnič, protože motor přesuvny vyžaduje 24 V= a já mám v kolejišti jen 12 V. Měnič nemusí být galvanicky oddělený, takže stačí obyčejný za pár šupů z Číny.
Indikace polohy:
Přesuvna bude v běžném provozu částečně skrytá pohledu návštěvníka i obsluhy a proto bude dobré ji doplnit indikací polohy a provozního stavu někde na viditelném místě. První úvaha směřovala ke třem (čtyřem) LED pro zobrazení pozic 1, 2, 3 a „doraz“, to ale vyžaduje 4 výstupy Arduina a nic víc neumí. Současná digitální doba ale nabízí mnohem víc – Arduino obsahuje a umí řídit I2C sériový výstup na displej, k tomu stačí dráty jen dva (+ napájení) a možnosti jsou nesrovnatelné.
Sehnal jsem tedy maticový displej 8×8 bodů s IC rozhraním a do kódu Arduina doplnil jeho ovládání. Je to snadné, stáhněte si knihovnu Adafruit pro tyto displeje a pak jen tam, kde se vypisuje hlášení o přesunu nebo dosažení pozice, vložíte příslušné příkazy. Lze nadefinovat i vlastní znaky, čehož jsem využil pro zobrazení čísla se šipkou. Takže po zadání povelu dostanete potvrzení, že povel přišel a co se právě děje, Detaily v druhém videu níže.
Další vývoj:
Poslední nápad na základě zkušeností z provozu – doplnit optickou závoru napříč přes koleje na oba kraje přesuvny. Pokud se stane, že se vagón či lokomotiva ocitnou částí na přesuvně a částí na „pevné zemi“, hrozí poškození a zničení modelu. Takže optozávora rozpozná, že v dělicí rovině je překážka a nedovolí pohyb přesuvny.
Nově jsou na trhu k sehnání mnohem tišší drivery pro krokové motory – třeba TMC2208, který má vnitřní interpolaci na 1/256 kroku. Krokový motor je pak napájený více méně sinusovkou a nebzučí. To bylo dáno požadavky výrobců 3D tiskáren. U uvedeného driveru lze ale i tak nastavit mikrokrokování na 1/2 až 1/16 kroku, ale je to spíš pro potřeby přesnosti (což není nutné pro přesuvnu ale třeba pro točnu), motor vždy dostává povely v násobcích 1/256. Změna typu vyžaduje úpravu propojení (drobná odlišnost v přiřazení vývodů) a pokud by bylo potřeba měnit mikrokrokování programem pak i drobnou úpravu zde, pro volbu se používají jen dva piny.
Videa ze zkoušek:
Ovládání pomocí tlačítek, ovládání DCC ovladačem, funkce nouzového zastavení a opakovaný rozjezd, najetí do výchozí pozice pro kalibraci.
Téměř hotová verze – ovládání DCC ovladačem, displej s indikací cíle a dosažené polohy, nouzový stop.
Další informace a zdroje:
http://www.honzikovyvlacky.cz/2016/10/12/inteligentni-ovladani-segmentove-tocny-n-a-dalsich-zarizeni-na-modelovem-kolejisti/ – řešení segmentové točny a jejího řízení tlačítky
http://www.fucik.name/masinky/presuvna/ – schéma a bližší popis k výše uvedenému
https://mrrwa.org/2017/12/23/dcc-contro … or-driver/ – DCC točna
https://mrr.trains.com/videos/layout-vi … aging-yard – přesuvna na ovládání tlačítky, tohle jsem upravil pro svůj první pokus
https://mrr.trains.com/-/media/Files/PD … olcode.pdf – kód k přesuvně výše
https://how2electronics.com/control-ste … r-arduino/ – jak řídit motor s plynulým rozjezdem a dojezdem, dobrá záležitost.
https://www.rmweb.co.uk/community/index … duino-uno/ – fórum o stavbě točny, ale trochu se to pak rozvolnilo
https://www.adafruit.com/product/1080 – popis maticového displeje, níže v popisu pak návod na zapojení, knihovny pro Arduino a jiné počítače, příklady použití
https://www.electroschematics.com/ir-decoder-encoder-part-2-diy-38-khz-irtr-module/ – návod na optozávoru s modulovaným IR vysílačem pro potlačení vlivu okolního světla
Doporučuji si projít řešení a informace na uvedených odkazech, člověk se pak ve věci lépe orientuje.
To je zatím vše, pokud se pustíte do zkoumání a dostanete-li se do nesnází, napište, pokusím se poradit.
Pokud by někdo z výrobců dekodérů chtěl kód či jeho část využít komerčně, je to možné, ale po dohodě a za poplatek.
(c) Jiří Zlámal leden 2021/únor 2022
Dobrý deň, aká súčiastka je na schéme pod IR detektorom? +MOT,GND,GND, +5V. Zo schémy to nie je jasné.
Zrejme to bude svorkovnica. Zle som sa pozeral.
Dobrý den, zaujal mne Váš příspěvek https://how2electronics.com/control-stepper-motor-with-a4988-driver-arduino/. Nevím ale jak, či z čeho je napájena Arduino deska. Z
PC, ale GND je dvakrát, nebude to vadit.
Děkuji za objasnění, začínám a fest tápu.
Dobrý den, Arduino se napájí čímkoliv v rozsahu 5 – 12 voltů.
Příspěvek v odkazu v komentáři není můj, ale princip je stejný. Na obrázku u mne je +MOT napájení pro motor a +5V napájení Arduina. Když budete mít motor na 12 V, můžete napájet Arduino i motor společně (jen pak pozor na periferie, třeba optosenzor – ten bude chtít možná jen +5V, ale ty si vezmete z 5V výstupu Arduina).
Více třeba zde: https://navody.dratek.cz/technikuv-blog/napajeni-arduina.html